ACS Motion Control's 3rd-order multi-axis look-ahead trajectory algorithm delivers smoother, faster motion
ACS Motion Control has introduced an advanced 3rd order look-ahead trajectory generation algorithm that optimizes the efficiency of motion control systems. Increasing acceleration, smoothness and velocity, while minimizing motion induced vibrations and disturbances, 3rd order look-ahead trajectory generation maximizes any systems throughput.
Maximum velocity and acceleration limits for each motion axis are set according to stage parameters, and maximum jerk can be optimized by each user. Any of these parameters can be changed on the fly during motion for further control and optimization.
The motion controller constructs optimally smooth multi-axis trajectory through user-defined path, based on independent axis parameters
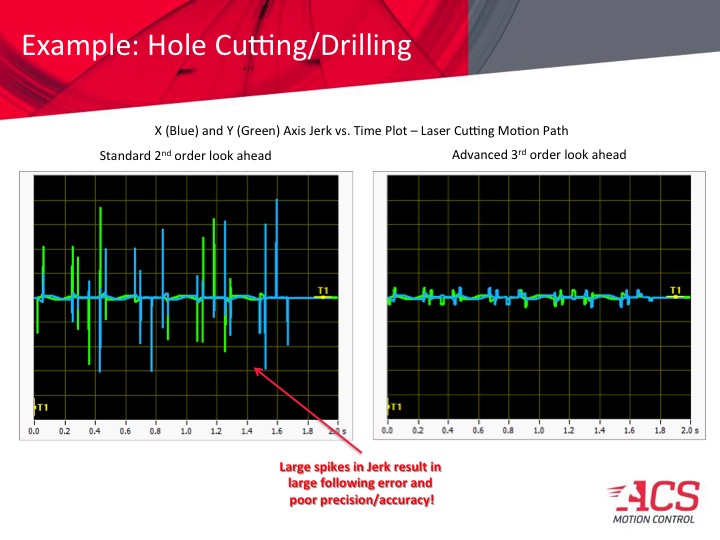
“A 2nd order look-ahead trajectory generation algorithm, which only places limits on velocity and acceleration, can result in significant jerk and vibration in the system, reducing the throughput of the equipment. The more advanced 3rd order look-ahead trajectory generation, which limits jerk, provides much smoother motion and reduces vibration,” said Jason Goerges, General Manager at ACS Motion Control.
The 3rd order look-ahead trajectory generation algorithm is ideal for a wide range of motion control applications including smartphone PCB/glass laser cutting, via hole laser drilling, LED/OLED inkjet printing, semiconductor wafer scribing, precision conformal coating, precision automated fluid dispensing, precision additive / 3D printing.
The 3rd order look-ahead trajectory generation algorithm can be implemented with any ACS Motion Control product.