Power systems must migrate with core vehicle technology
In less than ten years, you will have the option to let your car drive itself: You’ll tell your car where you want to go and enjoy a safer, less stressful, and more productive journey getting there. It may seem a bit farfetched but a growing consensus suggests that this vision is nearer to realization than one might think. That several large corporations, well steeped in technology, are making significant investment toward this goal suggests that the industry is ready to meet the technical, business-model, and public-policy challenges to autonomous-vehicle deployment. In fact, just one such program, Google’s Self-Driving Car project, has already logged over 1.2 million miles on prototypes and modified commercial vehicles operating in autonomous mode and is adding 10 to 15 thousand miles per week (see Figure 1).

Click image to enlarge
Figure 1 - A modified Lexus RX 450h hybrid equipped with a Google prototype Self-Driving Car system integrates a roof-mounted 360° LIDAR and front facing radar mounted behind the grill. (Photo by Steve Jurvetson, licensed under CC by 2.0)
Although, conceptually, this will represent a step change in how we think about personal, public, and commercial transportation, the path to deployment and, ultimately, broad-based commercialization is necessarily evolutionary: Autonomous and driver-controlled vehicles will have to coexist for a long time. In recognition of this fact and to serve as a framework for both industry and regulators, the National Highway Traffic Safety Administration (NHTSA) has defined five levels of vehicle automation (reference 2). These range from Level 0—No Automation—to Level 4—Full Self-Driving Automation. Between the extremes are various degrees of automated driver support ranging from, say, adaptive cruise control to autonomous operation under limited roadway, traffic, and weather conditions.
Sensing and control features have already started to creep into Level 1 driver-controlled vehicles to enhance, for example, situational awareness and overall safety. Evidence of this trend includes some driver-controlled vehicle designs that have integrated several sensor-based blind-spot- and lane-drift-detection technologies for collision avoidance. Similarly, we’ve already seen versions of automated parking (a Level 2 function), adaptive cruise control, and emergency-stop systems with both front- and rear-facing sensors. As vehicle automation capable of Level 3 and Level 4 operation approach commercialization, expect to see additional electronics for communication, information retrieval, and entertainment populating vehicle cabins.
Next-wave data demand
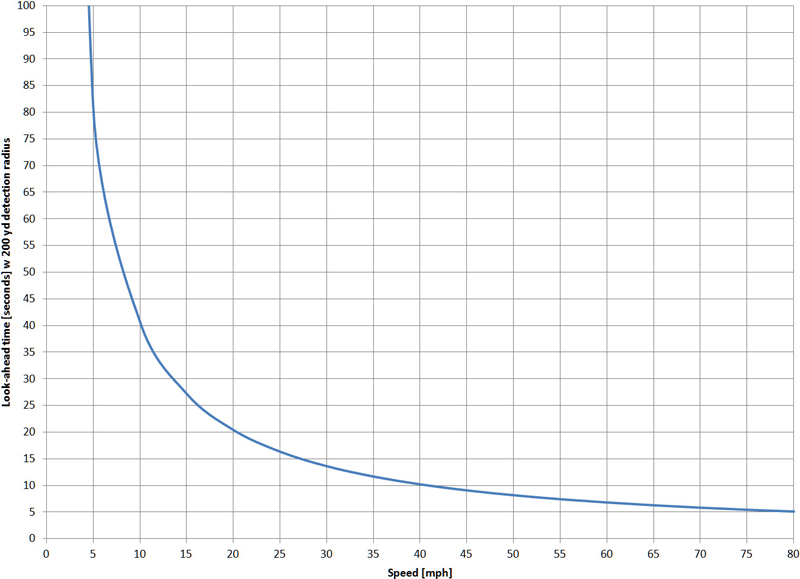
It goes without saying that these vehicles are far more data driven than even our most sophisticated driver-controlled automobiles. But, that fact coupled with the control system’s complexity and the criticality of its integrity have important implications for the system’s electrical, mechanical, and thermal design. While commonly deployed technologies such as GPS will remain for course location, routine route planning, and ETA estimation, significant additional guidance will be required. Development and proof-of-concept vehicles are already demonstrating the capability of onboard scanning LIDAR and sophisticated rendering and recognition software to identify roadway limits, fixed obstructions, and moving objects within the field (see Figure 2). However, to succeed under all operating and weather conditions on all road types and surfaces against all hazards, vehicles will require substantially more positional and situational awareness. For example, LIDAR is limited to line-of-sight object detection and ranging. Although they have a detecting and imaging radius of about 200 yards, obstructions of even modest height can obscure LIDAR’s view at much shorter distances. Additionally, even on open obstruction-free highway under ideal weather and road conditions, a 200-yard range constitutes a look-ahead of less than seven seconds at 60 mph (see Figure 3). Radar provides limited ability to see past certain obstructions and is less affected by weather than is LIDAR but, as implemented on vehicles thus far, offers a narrower detection angle and more limited range.

Click image to enlarge
Figure 2 - Real-time 3D image generated by roof-mounted spinning LIDAR system. (Photo by Steve Jurvetson, licensed under CC by 2.0)
Click image to enlarge
Figure 3 - Look-ahead time vs forward speed with a 200 yard detection radius. (Figure courtesy JAS Technical Media, used by permission)
First-generation AVs will be self-reliant by necessity with regard to data collection and hazard detection. Google’s Self-Driving Car fleet has already demonstrated the effectiveness of wholly on-board systems. Eventually, supplemental data will derive from external sources as methods for vehicle-to-vehicle and vehicle-to-roadside-node data sharing emerge. The externally supplied data will, to a certain extent, mitigate range and look-around limits, and provide real-time traffic-pattern intelligence that no single-point data collector could amass.
A third option compares real-time 3D video captures to highly optimized lateral and longitudinal views to establish a vehicle’s road position to a high degree of accuracy. For example, TomTom’s recently launched RoadDNA can match its stored images with vehicle sensor data in real-time and establish vehicle position on the road, even while traveling at high speeds or, importantly, when changes occur to the roadside. The company reports its image compression codes 25 kB/km of roadway, which translates to about 160 GB to store a roadway database for the US.
The data that describes individual objects, positions, and velocities in this application are not exceedingly complex. However, there are a great number of objects, positions, and velocities for which to account and the data about any one of them may have an exceedingly short useful lifetime: 60 mph corresponds to about 5½ car lengths per second.
Although it features the highest speeds, highway driving may not be the most difficult to automate. Note, for example, that relative velocity is often more important a consideration than absolute velocity when assessing the immediacy and degree of hazard a nearby object presents. So, while highways present the fastest and largest traffic flows, they lack the pedestrians, bicyclists, manned and unmanned skateboards, pets, balls, and wind-blown trashcan lids that so contribute to the secondary-road driving experience.
Powering autonomy
Future vehicle dependence on a large complement of electronic sensors, signal processors, computational resources, and actuators will be beyond anything found in traditional driver-controlled cars. Given the already challenging space constraints within an automotive design, power subsystem components for this application must deliver extremely high power density.
The notion of power density extends beyond the confines of individual power-conversion components, however, and must include the space required by external components as well. This is particularly true of reactive components, which in some power subsystem designs take more space than the active components. In addition to devices with small footprints, low profile components are attractive in AV control systems for two reasons. First, they help minimize chassis size, improving overall functional volumetric density. Second, they present a lower moment of inertia as computed at their points of electrical and mechanical attachment, which is important for reliability in an environment characterized by high levels of mechanical shock and vibration.
While control technologies are under development during the pre-commercialization phase, control systems retrofitted into existing nominally driver-controlled vehicles are equipped with power subsystems operate on a 12.6 V raw energy source. During commercialization, manufacturers of electric-vehicles (EVs) or hybrid-electric-vehicles (HEVs) may prefer to power the AV control system from the vehicle’s 290 V (nominal) traction battery to isolate the system from the use-accessible SELV (safety extra low-voltage) power bus.
From electrical-design and sustaining-engineering perspectives, benefits accrue to power subsystems that accommodate either power source simply by swapping out one power front-end converter for another, with no change in down-stream-observable characteristics. The result is a design that can easily adapt to either energy source with little or no design risk. Additional benefits accrue to such designs if they are reusable in part to service fixed-node data collection and communication tasks, which will operate on still different source potentials.
For example, Vicor’s DCM family has been extended to include low-input-voltage models such as the 30 V (nom) input power-subsystem front end that features an operating input voltage range of 9 to 50 V—appropriate to automotive applications. DCMs provide galvanic isolation to over 4 kVdc, voltage conversion, and regulation. Vicor’s 30 V input DCM in ChiP (Converter housed in Package) form factor delivers up to 160 W with power density of 395 W/in3 and typical peak conversion efficiency of 92%. Future models will have nominal outputs of 5, 12, 15, 24, 28, or 48 V. A pin-programmable trim pin allows a DCM’s output voltage to vary by as much as -40% to +10%.
Higher input-voltage versions, such as those compatible with the traction-battery voltage range, can deliver 600 W with even greater power density, in excess of 1.2 kW/ in3. These DCMs provide nominal 13.8 V outputs with a pin-programmable trim range of -17% to +12%. Within either input voltage range, DCMs offer vehicle control-system designers power densities beyond those available from traditional full-brick converters.
DCMs provide the full range of protection functions to guard against input over voltage, input under voltage, output over current, output short circuit, and power train over temperature conditions. The converter’s ZVS control method supports high frequency switching, reducing both the size and cost of external filtering components.
For applications that require greater power or power-train redundancy, systems can operate DCMs in parallel arrays of up to eight units with no performance degradation. DCMs’ automatic current sharing is useful not only for power-subsystem scaling but also for seamless system operation with redundant energy sources even with dissimilar source voltages across an array—a particularly attractive attribute in critical applications like AV control systems.
Power components in the ChiP form factor embody a design discipline that arranges power components on both sides of the PCB. This approach reduces losses due to parasitics, distributes heat sources across the footprint, and provides effective cooling paths through both top and bottom surfaces. The assemblies are finished with a thermally enhanced encapsulant that forms efficient interfaces to thermal-management accessories such as heat sinks, cold plates, and heat pipes.
These components can take advantage of three cooling strategies: Cooling the top-side only; cooling the top side and leads; and cooling the top side, bottom side, and leads. The manufacturer specifies each part’s power derating curve according to cooling method, giving the thermal designer flexibility to optimize a design, choosing the best balance of per-converter power, temperature range, and cost.
Thermally adept power front ends
Another recent packaging innovation is the Vicor Integrated Adapter (VIA), which simplifies the power subsystem’s thermal design and integrates additional protection functions. Converters in these thermally adept packages greatly simplify the mechanical and thermal aspects of the system design. They also eliminate PCB layout challenges and assembly costs associated with separate circuits to implement integrated inrush current limiting, transient suppression, and EMI filtering. Chassis-mount versions can mount to a bulkhead or to the system shell or chassis, occupying what is often otherwise unused space.




