High-side automotive battery monitoring
Assessing battery charge and health depends on synchronized measurements of voltage, current, and temperature.
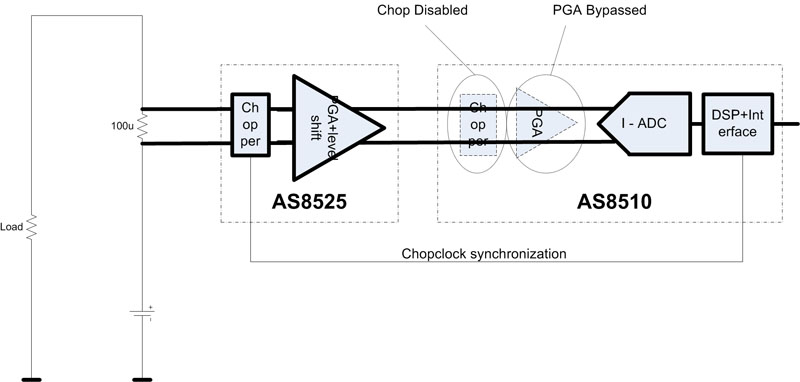
Figure 1: Functional blocks for amsï½s two-chip sensor interface for high-side automotive battery current sensing.
Manufacturers are electrifying more functions within a car, reducing the mechanical load on the internal-combustion engine. These functions include water, oil, and fuel pumps; valve actuation; and power steering, in addition to safety, navigation, and infotainment systems. As the power load shifts from the engine to the vehicle's battery, the requirement to keep the battery charged and functioning correctly becomes even more critical. Designers are requiring better battery management capabilities to monitor and distribute power. SoC (State of Charge) and SoH (State of Health) are two key attributes of lead-acid batteries that battery sensors monitor. SoC, which indicates how much charge the battery can deliver, is expressed as a percentage of a battery's rated capacity. SoH indicates how much charge the battery can store. To compute these values, a monitoring system measures the battery's current, voltage, and temperature and sends these data to a microcontroller. The microcontroller filters the battery data, computes the SoC and SoH, and sends the results to the ECU (electronic control unit) via the industry standard LIN communications interface. A battery sensor must simultaneously measure the battery's current and voltage. Excellent accuracy is required for SoC measurement and to track dynamically the battery impedance. The monitoring system must make these measurements often, typically at a rate of 1 kHz, with the current and voltage measured simultaneously and with virtually no insertion loss. Key attributes of this measurement system are very low noise, high linearity, and zero offset. Additionally, the system makes all measurements under the harsh conditions of an automobile engine compartment. Traditionally, battery sensors were designed to be placed at the negative pole of the battery. However, there are benefits to configuring the sensor for high side measurements. This would provide the ability to place the sensor apart from the battery in the junction box, reducing demands on form factor and mechanical rigidness, which is the most significant cost driver when the sensor is located at the battery pole. Manufacturers could also combine a high-side sensor with a junction box module, which addresses functional safety. This is becoming increasingly important when sharing a microcontrollerâ€"another opportunity to reduce cost. This would also support the trend to design vehicles with fewer, more centralized ECUs. An example of a high-side battery sensing system includes the ams AS8510 Data Acquisition Front End and the AS8525 High-Side Current Sensor Companion IC. It uses a 100-Î�? shunt at the battery's high side to measure currents ranging from 1 mA to more than 1 kA with negligible insertion loss. It enables stand-by current, voltage, and temperature monitoring modes at very low current draw of around 80 Î�A - a crucial requirement in automotive battery sensors. The system's output can route to an existing ECU, thus reducing BOM cost. Shunt resistor specification Current sensing requires the use of a low-insertion-loss 100-Î�? shunt connected to the positive battery terminal in series with the load (Figure 1). The temperature drift at the shunt resistor must be extremely low, as any drift in the resistance value of the shunt directly affects the current readings generated by the sensor. For the resistive element, ams recommends a 100-Î�? BAS shunt with Manganin alloy. Its temperature coefficient is low, and its Seebeck coefficient is similar to that of copper. This means that the signal generation attributable to thermocouple effects when inserted into a copper rail is negligible. The shunt's change in resistance value over time is also both minimal and predictable.
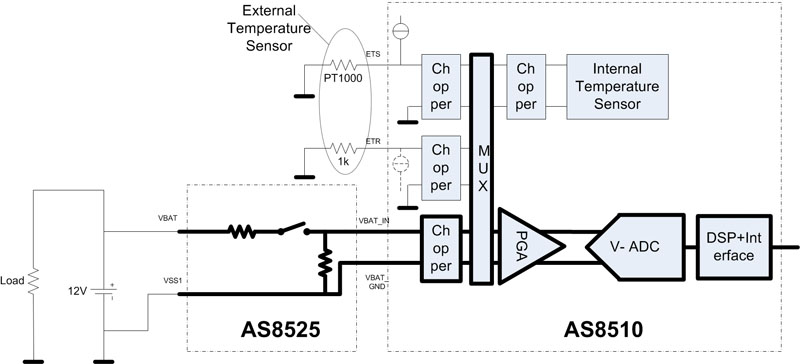
Wide measurement range The system measures current over a range of 1 mA to 1 kA. This requires a sensor interface with a measurement range of > 100 mV, and a resolution of better than 1 �V. The system implements auto zero offset by a sequence of signal-conditioning functions: chopping the analog sensor signal, amplifying and level-shifting the signals, digitizing them, and de-chopping in the digital domain. The architecture enables cancellation of the offset and the low-frequency noise components of the entire measurement path. In this example, the analog signal chopper receives the shunt signal at a nominal 14 V common-mode input voltage. The signal processing chain amplifies and level shifts the chopped signal to a low common-mode voltage and forwards the result to the AS8510's ADC. Voltage Measurement To make voltage measurements, a precision resistive divider inside the AS8525 attenuates the battery voltage, which then connects to the second data acquisition channel of the AS8510 as a differential signal (Figure 2). The system can multiplex this channel with input channels for either an external or internal temperature sensor. Temperature Sensing If the battery sensor is placed at the battery terminal, the AS8510's internal temperature sensor can be used to pick up the battery temperature through the terminal, shunt, and PCB. If the sensor's electronics are located away from the battery in a separate compartment, the system can use an external temperature sensor to measure the battery's temperature. The common-mode input signal produces current measurement errors of typically 0.05% per Volt. As the common-mode input signal for the shunt is the same as the battery voltage, and the system measures the battery voltage in sync with the current, this error is correctable in software in the external microcontroller. An end-of-line calibration procedure can capture an accurate value for the common-mode error: Apply a reference current at two different common-mode shunt voltages, measure the deviation, and store this value as the calibration factor. ams AG

.jpeg)
 Single.jpeg)
