Industrial Power Density and Connectivity Challenges
Smart and power-efficient motor controls are now central to every piece of equipment used in industrial and manufacturing applications
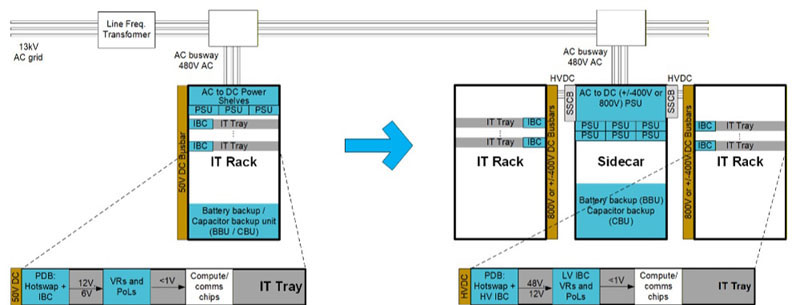
Figure 1: The evolution of ABB’s modular components is enabling higher power densities for space-constrained applications
The AC-to-DC power conversion modules used in advanced automation and robotics systems continue to face escalating challenges of power density, precision, intelligence, and connectivity to keep pace with advancements in evolving motor control technology.
Board-Level Power Density and Thermal Management
The exponential increase in processing power of advanced motor controls, along with additional features for performance data monitoring and networking, adds up to heightened demand for more power – but in smaller and smaller spaces.
Tackling this size-to-power-paradox often begins at the printed circuit board (PCB) or power module level.
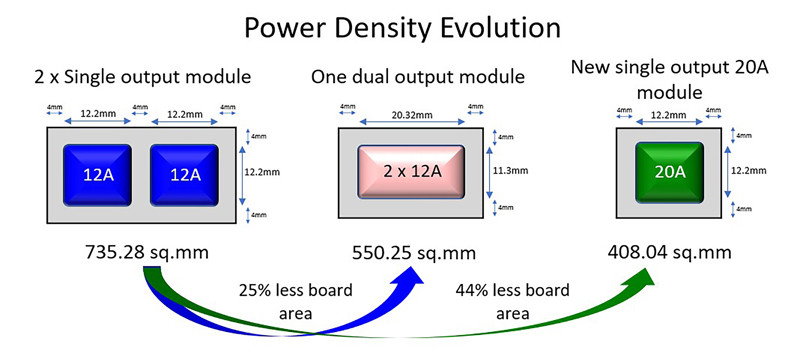
For example, take a controller that needs two separate 12-amp power modules to manage different parts of the load. That means you would need two modules on the circuit board to support the load plus the requisite space between modules – potentially wasting valuable board real estate. Instead, consider another approach. With a single 24-amp (A) power module that can employ, or split, dual 12-amp outputs in a single component, the power footprint can be reduced from 734 mm2 to 550 mm2 — resulting in a 25% gain in board real estate. The latest in modular technology has even achieved 20A in a 408 mm2 footprint for a single output voltagemodule.
Further optimizing board real estate, features, performance, and previously separate power control functions (such as controllers, filtering, and active and passive components) are now often all part of standard, consolidated, power modules. These power modules can offer optimum levels of efficiency, thermal management, and intelligence that deliver users value that extends beyond raw power. Examples of the types of intelligence that can be delivered include web-based critical parameters, performance modeling, and software that enables live, real-time communication and telemetry about power module performance. This intelligence provides real value to both the designer and the system user.
Below is a simulation of a Bode Plot model that shows the Loop Gain and Phase of an optimized control loop of ABB’s PVX006 module:
Power density is very important in the evolutionary path of power products to increasingly add value to end applications. Achieving high power density levels, however, can come with challenges – for example, in the form of thermal hot spots at higher power levels. In typically hot manufacturing environments, and with motor controls in enclosures or integrated into robotic systems, fans are usually employed to cool board-level components. But fan cooling requires more space, more power and comes at a cost of reliability and added maintenance. Think about the dust and debris that can be found in some of these manufacturing applications. You wouldn’t want those contaminants being sucked into the internal components by a fan.
To address this, some open-frame power modules, such as ABB’s CLP power supplies, employ fanless conductive cooling by placing heat-intensive integrated circuit (ICs) components on the bottom of the PCB – which was previously an unused or partially used space. This creates a conductive cooling path through the system chassis to manage thermal output and maintain optimally rated power levels – all while eliminating the power, space, and maintenance needs of a mechanical fan.
Below is a cross-section illustration of ABB’s CLP open-frame power supply embedded in a sealed enclosure. It shows the application of a thermally conductive material being employed to sink the heat generated by the power supply out of the enclosure. Essentially, in this application, the enclosure is being used as the heatsink of the power supply.
Connected “Intelligent” Power
Integrating Industry 4.0 manufacturing systems, with an array of smart motor controllers, requires that power conversion modules be both “smart” and networked to communicate with plant-wide distributed control systems.
These high-performance power supplies, which are now widely used in advanced motor controls, employ a software layer to control all active power components – like those found in the power factor controller or in the secondary DC-to-DC section of the power supply. These controls optimize the efficiency of the power conversion at very high levels regardless of the motor power load and input voltage range, resulting in high efficiency over the entire power and input voltage range.
Power supplies for motor controls can also be managed via inter-integrated circuit (I2C) software and communications where data on power module parameters – such as output current, voltage, thermal conditions, over-temperature, over-current, and over-voltage – can be collected. This data can then be flagged and communicated to manufacturing control systems to either generate an automated response or to signal an alert of immediate or near-term response.
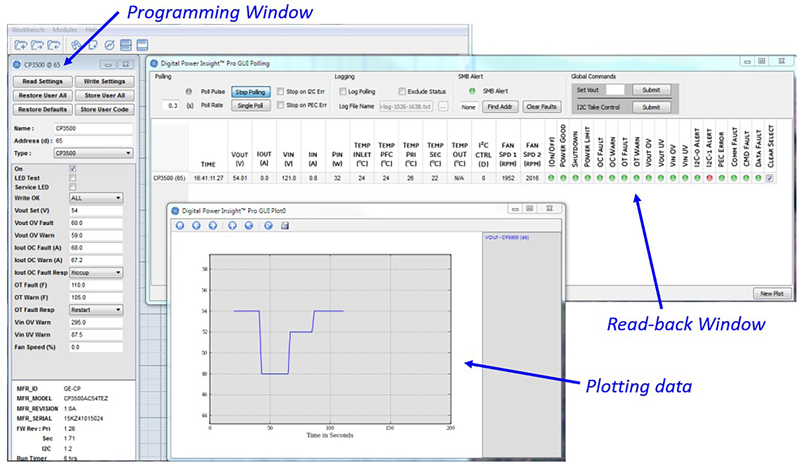
Below is a screen shot of ABB’s ProGUI graphic-user-interface. It includes three separate windows, making it easy to take advantage of the data and programming ability being provided. The read-back window shows all information and data being reported via the standard PMBus (I2C) protocol. The programming window allows for user-configurable values that are stored in the power supply’s on-board memory. There is a factory default setting to fall back to if needed as well. The third window is the plotting window, which can be setup to plot any value being reported within the read-back window via drag-and-drop, start-to-plot functionality.
Click image to enlarge
Figure 2: Screenshot of ABB’s ProGUI graphic-user-interface
Further, advanced ethernet-based network communication can be used to transfer and store data in a “black box” for off-site control and analysis in the event of a system failure.
Powering Precision
Any motor control used in exacting manufacturing or robotics applications, whether using AC or more typically used DC motors, requires highly accurate output voltage to the motor control load to precisely control and place the movement of the automated equipment – from assembly pick-and-place robots to fully actuated robotic arms.
Take, for example, the demands on motor controls used for new additive printing technologies. The accuracy of placing minute droplets of melted plastic or metal, layer upon layer, requires tolerances of up to 1/1,000th of an inch. The quality and consistency of the power output required to rapidly move and position DC stepper motors carrying the 3D print nozzles needs to be equally as accurate. This is especially true during the rapid pulse loading, or on-off power cycles, of the motors, which can put an enormous strain on conventional power supplies.
Companies, including ABB, provide this power precision in their modules by intelligently managing the power transient response – basically the rapid on and off cycle of the power demand. This is done by employing control loop technologies to help ensure a tightly controlled output voltage and reliable power each time the load to a DC stepper motor cycles between zero and full power. Managing transient response improves the output capacitance of the power system as well as the overall reliability of the power supply as heavy transient loads can stress the power supply.
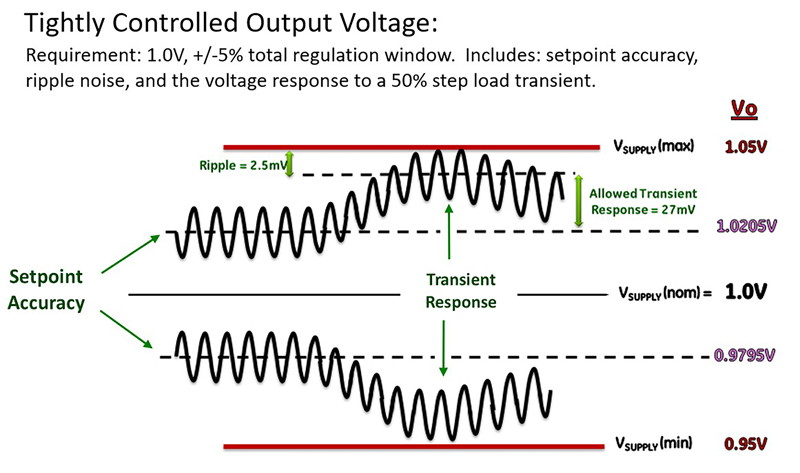
Below is an illustration showing how the ripple content and transient response of the power supply’s output sums up to create the challenge of keeping a very tight window of total voltage regulation. In the below example, we are looking at ABB’s UDT020 (20A module) during a transient in the load and how the voltage responds with load jumping up to 50% of max rating as well as during the load dump back down from the 50% jump. In this example, the voltage is held within +/-5% total regulation including setpoint accuracy, ripple noise and the above mentioned 50% load step.
Click image to enlarge
Figure 3: Output voltage analysis and the total window of output level for ABB’s UDT020 (20A module) during a transient in the load
Precision Robotics – Fixed or Mobile
The adaptive 3D printing example – and most of the assembly equipment and robotics examples in this article – fall under the broad category of stationary robotics. These fixed systems can be found in applications such as materials handling and assembly line pick-and-place environments, traditional multiaxis robots, and even new man-machine interactive collaborative robots, or “Cobots.” Today, these fixed robotics occupy almost 60% of traditional factory floor space.
This “assembly-floor” density requires equally compact yet high output power solutions, much like the controller board-level processing density discussed earlier. AC-to-DC power supplies and board-level voltage converters must provide high power density levels to help ensure the appropriate power is provided in what are often very compact robots and enclosures. In motor control applications like these, power systems typically run between 500 and 1,000 watts (W), and even up to 3,000W, demanding power densities of up to 40W/inch2.
Coupled with the power density, efficiency, and thermal needs of fixed robotics, new warehouse mobile robotics present even more complex motor control and power management challenges. Ironically, these mobile robots for 7x24 warehouse operations spend a fair amount of their transport time sitting in charging ports – sometimes for up to 8 hours per 24-hour shift. The power irony is that these mobile inventory robots also need larger batteries to power their onboard DC motors and controls, in addition to self-powering the extra weight of the larger batteries themselves.
On the horizon, we see warehouse mobile robotics being charged wirelessly via inductive coupling. This will allow for frequent charging of the battery at opportune times, postponing the need for a longer charging cycles and extended down time of the robot. Frequent charging not only boosts the productivity of the robots but also allows them to carry a smaller battery, which in turn improves the capital expenditure and operational costs through better use of the battery capacity. An inductive, “touchless” approach helps save time from personnel having to connect contact-based charging at centralized charging stations. It also improves on reliability and warehouse efficiencies.
As advances in industrial automation and robotics drive motor controls to new levels of functionality, precision, and efficiency, all in smaller and smaller footprints, power designers will continue to build new high-density, high-efficiency solutions for new Industry 4.0 innovations.