Standardized Testing is Critical for Emerging Automotive SerDes and Zonal Architectures

The rapid evolution of autonomous and electric vehicles is driving unprecedented complexity in automotive electronic architectures
Figure 1: Software defined vehicle
Emerging SerDes standards such as OpenGMSL, MIPI A-PHY, and ASA are designed to support high-bandwidth, asymmetric data links between sensors and central processing units. These standards are crucial for managing the growing volume of sensor data, supporting zonal architecture, and ensuring functional safety in next-generation vehicles.
It is no secret that automotive technology is quickly evolving. Cars are transitioning from hardware-driven systems to software-defined vehicles (SDVs), where software takes the lead in controlling core functions and features. This evolution enhances safety, efficiency, and user experience while fundamentally changing how vehicle data is acquired, processed, and routedforreal-time, multimodal responsiveness.
Because of this, if the electronic architecture of today were to grow to accommodate these advancements, it would quickly become complex. The number of sensors and displays is increasing, and their functions are becoming more sophisticated. The SDV architecture demands not only higher data transfer rates, lower latency, and more reliable network connections but also simplicity and upgradability.
As SDVs incorporate an increasing number of data-centric sensors and subsystems, they now generate more data than traditional designs can efficiently handle. At the same time, automakers continue to strive to reduce vehicle weight to minimize costs and increase driving range.
The traditional domain strategy assigns each subsystem to its own communication bus that runs throughout the car. While this approach offers a straightforward layout, it results in heavy, parallel, and often duplicate cross-wiring, necessitating extensive cable wraps.
In contrast, zonal control addresses the problem by focusing on location rather than device function. A zonal architecture consolidates all devices in a specific area (e.g., hood, trunk, front left door) onto a single cable that connects to the central computer, comparable to a hub-and-spoke model. This design significantly reduces wiring complexity, lowers weight, and enhances serviceability. Consider the amount of wiring required as more sensors are added.

Zonal gateways complement this setup by integrating multiple physical and virtual ECUs at the edge. These edge domains include cameras and radars that capture the car's surroundings – this information is then routed to the central high-performance computer (HPC) for processing and decision-making. An option for that backbone is Automotive Ethernet optical fiber. A zonal architecture with a centralized computer typically features one or two HPCs, replacing the large number of traditional microcontroller units (MCUs). The total weight and cost of the harness assembly is further optimized by aggregating several sensor outputs onto a single, daisy-chained communication link. Combining the raw outputs of many sensors onto a single channel requires a high-bitrate communication system, which is achieved by increasing bandwidth and adopting increasingly complex modulation schemes, such as PAM-4.
Click image to enlarge
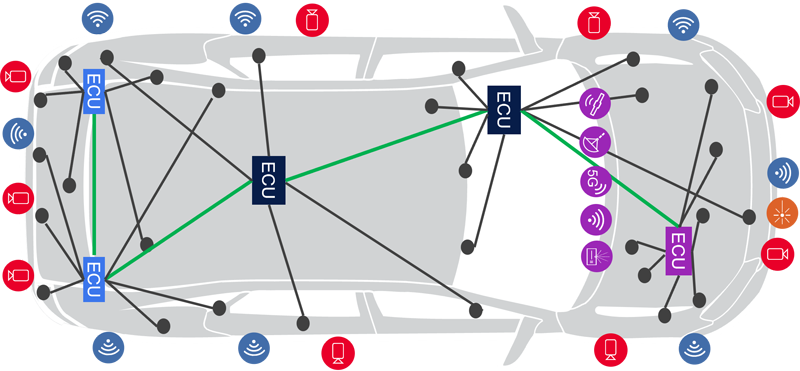
Figure 2: A traditional vehicle with a domain-oriented architecture, where software is embedded in a distributed hardware architecture, and domains are connected across the vehicle, is heavy, costly, and static
Click image to enlarge
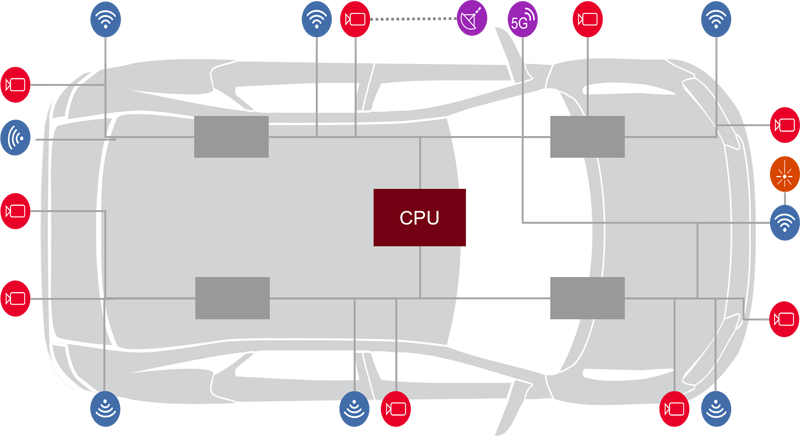
Figure 3: SDV with a centralized computer and zonal architecture aims to consolidate decision-making, where edge actuators are controlled by commands from the central computer to optimize power, reduce weight, simplify complexity, and lower costs
You’ve probably heard cars referred to as “data centers on wheels”. For good reasons, they are now handling terabytes of data, which brings new demands for keeping that data secure, resilient, safe, and private. To manage this, automakers are adopting edge computing strategies that process data closer to the sensors themselves. At the same time, there is a growing push for standardization, facilitated in some industries through plugfests and compliance programs, helping to ensure systems are reliable and interoperable.
Taking care of the edge
As a car becomes an increasingly complex platform for running business and infotainment apps, streaming videos, and updating routines based on learned user habits, it must simultaneously process gigabytes of sensor input and navigate traffic safely. An asymmetric link is ideal for vehicle sensors, which require high-speed output and low-speed control.
Emerging SerDes (Serializer/Deserializer) standards such as OpenGMSL, MIPI A-PHY, and ASA MotionLink are designed to support asymmetric data transmission. These links typically feature high-speed downlinks for data transfer and lower-speed uplinks for control and monitoring, optimizing power consumption and reducing transceiver complexity at the edge. These standards are also designed to support protocol tunneling, security, and functional safety.
Among these emerging SerDes standards, OpenGMSL is the most recently proposed open specification to enable high-speed asymmetric links for automotive sensor applications.
An open standard creates a competitive market and robust supply chain that drives down costs while still delivering application-specific features. However, the adoption of these standards across multiple companies introduces a new challenge: interoperability and performance consistency. This is where standardized test methodologies shine. A mature test plan with an established test ecosystem enables measurement correlation between different devices and multiple test vendors. This unifies requirements for silicon vendors, Tier 1s, and OEMs, accelerating their development cycles, reducing costs, and enhancing interoperability.
Driving Standards
SDV transformation success will depend on open standards, robust cybersecurity, strong industry partnerships, and the ability of organizations to adapt both their engineering practices and business models to ensure that tomorrow’s vehicles can continuously deliver new value and safer, smarter mobility experiences throughout their lifecycle. This transition to SDV is shifting intelligence and innovation into software, which will enable scalability, flexibility, and ongoing feature evolution. It also introduces new challenges in E/E architecture design. More sensors and displays with higher resolution are generating more data, requiring faster networks with higher-performance computing. OpenGMSL and other emerging SerDes standards offer promising solutions with power optimization and protocol tunnelling as options. Within that, the success of any Automotive SerDes standard, such as OpenGMSL, requires the development and adoption of well-defined test methodologies and compliance specifications.