Can the Fusion of AI and Sensor Innovation Revolutionize Human-Robot Interaction?
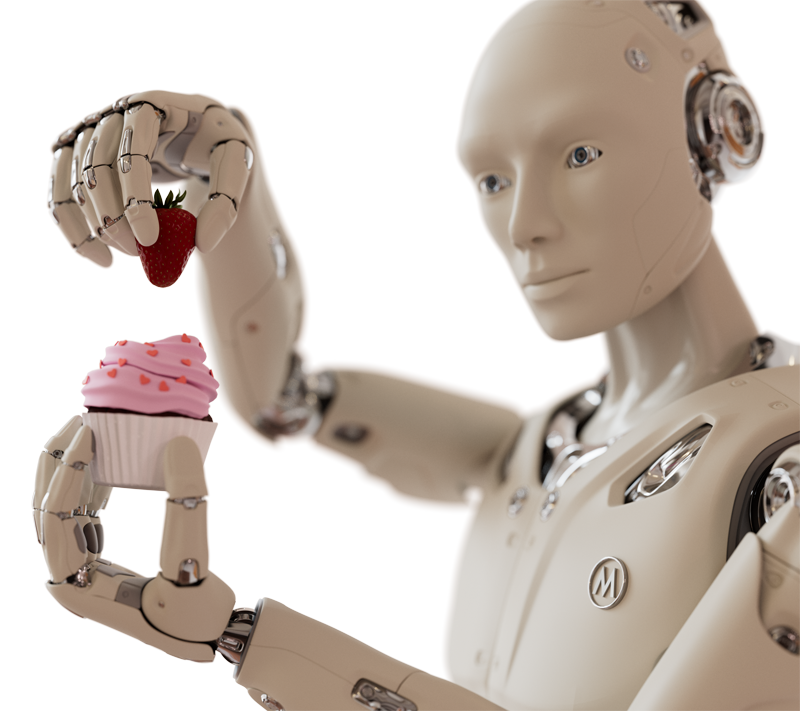
Figure 1: Melexis’ Tactaxis® technology supports the move towards more human-like robotics that can operate closely with humans in applications ranging from industrial cobots and domestic service robots
As the robotics industry advances into increasingly sophisticated roles, especially within service and humanoid applications, the need for machines that interact with their environments almost as naturally as humans has never been greater. While intelligent control systems lay the foundation for autonomy and precise decision-making, it is the innovative sensory feedback systems that complete the picture. These dual aspects ensure that modern robots can understand subtle environmental cues, adapt fluidly to unforeseen circumstances, and handle delicate tasks that once only humans could perform.
Recent research from the International Federation of Robotics (IFR) underlines the sector’s rapid growth and mounting expectations. For instance, cobots now represent 10.5% of all new industrial robot installations, with over 56,000 units deployed in 2023, a significant increase from the 14,100 cobot installations in 2018. Similarly, service robots continue to penetrate domestic, healthcare, and educational applications, with the market projected to exceed US$40 billion by the end of 2025.
Such trends not only underscore the growing demand for advanced robotics but also highlight the pressing need for absolute sensing. Against this backdrop, the integration of innovative sensor technologies, capable of enhancing both internal and environmental perception while driving design scalability, is vital for enabling robots to perform in complex, real-world situations, matching the subtlety and nuance of human behaviour.
Melexis, with a long history of innovation in automotive and industrial semiconductor sensors, is now applying its expertise to robotics. Within this article, we will explore the challenges of mimicking human-like interaction, examining Melexis’ new Tactaxis® tactile sensors, as well as its broader sensing portfolio, they are designed to help engineers realise the next generation of robotics.
Challenges of Realising Human-Like Interaction
Designing robots that engage with humans naturally and safely brings with it a host of intricate challenges. Achieving human-like interaction is not merely a matter of implementing sophisticated and well-trained artificial intelligence (AI) models, but involves equipping machines with a wide range of feedback. However, integrating additional sensing technology is not without technical challenges either.
Emulating the Nuances of Human Response
Human interaction is characterised by the ability to sense even the slightest variations in touch, weight, texture, or temperature. Our hands and skin quickly adjust grip and posture based on subtle feedback from a complex network of sensory receptors. To mirror this capability, robots must be equipped with sensors that can detect minute differences in force, temperature shifts, and other environmental signals, and this information must be sent to control electronics to allow intelligent predictive and adaptive adjustments to be made in real time.
While robotics in traditional controlled laboratory or industrial environments have often relied on fixed programming and limited sensor feedback, frequently making do with rudimentary force transducers and just a few encoders, the next generation of robots will need to seamlessly integrate a much wider range of sensory inputs. This integration in itself creates a challenge for engineers, increasing design complexity and costs, so it is critical that sensors designed for robotic deployments are designed to expedite development, while easing integration and assembly concerns.
Integration of Diverse Sensory Inputs
A further challenge arises in the necessity to fuse data from a wide array of sensor types. Advanced robotic systems rely on inputs from tactile sensors, positional encoders, temperature monitors, current sensors, and other external detectors. The process of integrating these diverse streams into a unified sensory model is not simple. It requires not just sophisticated algorithms that can reconcile differences in resolution, sampling rates, and inherent signal variabilities, but also the hardware itself must be designed in a way that aids smooth integration. This could involve employing standardised communication protocols that reduce compatibility issues or code-free sensor configuration that cuts development complexity. By addressing these integration challenges at both the algorithmic and hardware levels, engineers can ensure that the multifaceted sensor data converges into a cohesive stream, enabling robots to respond accurately and efficiently.
Click image to enlarge
Figure 2: With a force resolution of 30 mN, Tactaxis® sensors are capable of discerning incredibly small variations in applied force.
Shortcomings of Conventional Sensors and the Scalability Imperative
Some sensor technologies, such as optical encoders or simple force transducers, often perform adequately within the controlled confines of a laboratory. However, when deployed in the unpredictable scenarios encountered in domestic or service environments, they can falter. This could be because the sensor lacks the sensitivity to detect subtle or rapidly changing conditions, or it may not be robust enough for applications prone to dust, vibration, or other problems.
Furthermore, the pursuit of growth and emerging market opportunities in robotics presents a significant design scalability problem. In mass-produced robotic designs, ease of assembly and integration, alongside cost considerations and enhanced long-term reliability, are often as important to consider as the sensor’s performance.
Overall, achieving a truly human-like interaction in robotics needs a sophisticated blend of advanced sensor technologies and intelligent data fusion, designed to help engineers create robots with the nuanced, robust sensory feedback necessary for safe, efficient, and natural operation.
Tactaxis®: Enabling Robots to Feel
Supporting the move towards more human-like robotics that can operate closely with humans in applications ranging from industrial cobots and domestic service robots is Melexis’ Tactaxis® technology. Despite advances in robot vision and movement, tactile sensing has long remained underdeveloped. Tactaxis® offers engineers a solution, delivering crucial, real-time 3D force feedback for safe human-robot interaction and precise control.
Tactaxis® achieves its remarkable sensory capabilities by embedding a magnet within a soft, elastomeric layer, which in turn lies above a Triaxis® 3D magnetic sensing IC. This structure is reminiscent of the human skin’s tactile receptors, allowing the sensor array—or ‘taxels’—to capture 3D force data accurately. When pressure or shear is applied to the sensor, the magnetic field is altered, and these changes are precisely captured by the IC, allowing robots to perceive touch.
With a force resolution of 30 mN, Tactaxis® sensors are capable of discerning incredibly small variations in applied force. They are engineered to reliably measure normal forces up to 5N and shear forces up to 2N, and in unexpected scenarios where higher forces are encountered, the sensors can withstand up to 15N without damage. This sensitivity is vital for robots performing delicate tasks like adaptive grasping and fine motor control, essential for human-robot interaction and applications like carefully handling agricultural produce.
Furthermore, the compact sensor elements are designed to be easily configured into large arrays to cover complex surfaces or multi-fingered robotic hands. This flexibility means that whether the application is industrial assembly, healthcare robotics, or wearable prosthetics, Tactaxis® provides engineers with a robust platform that can be adapted to meet specific design requirements.
From an engineering perspective, integrating advanced sensors into robotic systems often poses significant challenges, particularly when tight production budgets and spatial constraints are involved. Tactaxis® addresses these issues through its compact design, measuring only 6 x 6 x 4.4 mm³ per sensor element, and factory calibration. This integration not only simplifies the deployment into various robotic platforms but also delivers substantial cost advantages compared to more elaborate optical or mechanical sensing solutions.
By providing continuous and nuanced feedback, Tactaxis® significantly enhances a robot’s ability to interact with its environment. Mimicking the perception mechanism of human skin, this sensor enables robots to learn from and adapt to human experiences, thereby facilitating smoother integration into everyday settings. The data derived from Tactaxis® allows for real-time adaptive adjustments in grip or handling, preventing damage to delicate objects and ensuring safe interactions when working alongside humans. Whether in the realm of industrial automation or healthcare assistance, this refined tactile feedback fosters a level of human-like interaction that is both engaging and inherently safe.
Wider Innovations in Melexis’ Sensor Portfolio
While Tactaxis® is a standout in robotic tactile sensing, it is one part of a broader suite of sensor technologies that Melexis manufactures that can support engineers in enhancing design innovation.
Arcminaxis®: Precision in Motion Sensing
Arcminaxis® exemplifies the careful balance between precision and practical implementation. Developed to deliver detailed feedback on position and speed, Arcminaxis® employs a unique dual-track Vernier-type magnet design alongside on-chip calibration. This enables the sensor to measure a full 360° range with an 18-bit resolution, capturing minute positional changes with exceptional repeatability.
Designed to overcome issues such as mechanical misalignments seen and residual magnetic interference, Arcminaxis® offers engineers a reliable and flexible alternative to conventional rotary encoders. Its capacity to integrate smoothly into various robotic platforms, from stationary arms to wearable exoskeletons, highlights its critical role in enhancing motion control in mass-produced robotic designs.
Expanding the Sensing Horizon
In addition to tactile and positional sensing, Melexis offers an array of complementary IC sensor technologies that address other critical aspects of robotics. These solutions, much like the dedicated robotics solutions Tactaxis and Arcminaxis®, are designed to drive innovation and reduce integration complexities. Melexis supplies various components—position, temperature, and current sensors, and latch & switch ICs—tailored to the specific challenges in modern robotics.
Conclusion and Downloadable e-Guide
The future of robotics is being shaped by the integration of innovative sensory feedback systems alongside intelligent control solutions. Advanced sensor technologies, like Tactaxis® and Arcminaxis®, are essential tools that can help engineers create safe, adaptive, and human-like robotic interactions that are critical in today’s diverse application environments.
Melexis’ broad portfolio of sensing and drive IC solutions are built around the company’s engineer-centric design, and are developed not only to meet the high technical demands of modern robotics but also to support engineers in overcoming integration challenges and optimising performance. By embracing these refined sensor technologies, designers can create robotic systems that are both highly efficient and capable of nuanced, natural interactions.
Engineers and industry professionals seeking to explore the latest robotics innovations, as well as key market statistics, emerging trends, applications, and challenges, are invited to download Melexis' latest e-Guide – “Engineering the Future of Robotics: Mastering the Integration of Enhanced Sensory Capabilities”
.jpg)