The proper topology makes all the difference
Did you know that every 10°C rise in ambient temperature reduces every component’s lifetime by 50%? That power supplies with drop-offs or variances can lead to premature failures and even completely fried parts in your system? Indeed, most agree that power-intensive applications need, and really must have, long-lasting and efficient power supplies. But what topology to use? Synchronous or nonsynchronous? Let’s look at the trade-offs of each topology.
Options to power your design
Every hardware system needs a power source, and the voltage level from the power source is usually higher than the application stipulates. Assume that you have a 9V power input and need to drop it to 5V to run your system. You have some options:
1. A simple voltage-divider with some basic regulation, such as a Zener diode. The Zener and its current-limit resistor drops 9V down to 5V, and the 4V is dropped across the Zener’s current-limit resistor. This action produces heat and wastes energy.
2. A 5V linear regulator (LDO). Again, you put 9V in and get 5V out; 4V is dropped across the LDO. If the circuit is drawing 1A of current, the LDO is dissipating 4W of power. You can also say that 4W of wasted power gets dumped as heat.
3. A DC-DC converter. Here, the switcher basically pulse-width modulates (i.e., uses pulse-width modulation, PWM) the output inductor and capacitor. When the output voltage reaches 5V, the PWM duty cycle drops to almost nothing. Very little current is drawn by the switcher, hence little power dissipation. This is definitely the most efficient design option.
The input voltages to a DC/DC converter can be any value, with 6V, 9V, 12V, 24V, 48V standard. Power transformers step down 120VAC to standard voltage levels, then rectify, filter, and regulate to DC voltages for commercial or industrial usages. As an example, the telephone system was established on 48V, a value determined from the voltage for the battery backup system.
If the AC mains go down, the battery backup system kicks in seamlessly. Portable equipment is a different story. These devices generally run from batteries that are already DC, but they need to be regulated. Because battery voltage drops over a period of time, you need to boost its output voltage and keep it regulated. So if your system is running at 3.3V, you need to maintain it at 3.3V even as the battery voltage drops.
Not all is as it appears
When designing a power supply, you can choose the “appears-to-be” low-cost solutions like the simple voltage-divider or Zener circuit mentioned above. Note that we said “appears-to-be” low cost because this derives from the bill of material perspective only. These approaches have the hidden and added costs of power loss, which cause high heat dissipation and decrease the lifetime of the electric components in the system. Meanwhile, an LDO has very low noise output, but its drawbacks include high power dissipation, large dropout voltage, and reduced battery life.
These days, designers turn to DC/DC converters to achieve the optimal output of efficiency, heat, accuracy, transient response, and cost. Straightforward, yes…but the road to optimal DC-DC power system designs can be as complicated as navigating a minefield without a map. The converter’s operating temperature limits its maxim output power, and operating temperatures are rising as industrial equipment form factors shrink. Most devices, moreover, typically have very little or no forced cooling/air flow. So what are your best DC/DC design options?
DC/DC design options
It is time to discuss nonsynchronous and synchronous DC-DC converter topologies. There are trade-offs between them. A nonsynchronous topology is an older design, noted for power loss across the external Schottky diode. This power loss equates to compromised efficiency. A synchronous topology is recommended here because it offers the high efficiency and fits in a more compact form factor by integrating an efficient MOSFET. This fundamental difference is illustrated in Figure 1, which compares the structural differences between a nonsynchronous converter and a more integrated synchronous solution.

Click image to enlarge
Figure 1. A nonsynchronous DC-DC converter topology (left) uses an external Schottky diode to regulate voltage. The synchronous topology (right) integrates a MOSFET to replace the Schottky diode.
Think about power efficiency. In recent years, analog IC vendors introduced synchronous DC-DC converters to improve power efficiency lost to nonsynchronous designs with their external Schottky diodes. Now a synchronous converter integrates a low-side power MOSFET to replace the external high-loss Schottky diode. The power dissipation of the low-side MOSFET affects RON, while the forward voltage drop across the diode VD determines the power loss of the Schottky diode. If the current level stays the same in both designs, typically the voltage drop across the MOSFET is lower than across the diode, resulting in lower power dissipation with the MOSFET.
Power dissipation across the diode in the nonsynchronous solution is:
PD = VD × IOUT × (1 – VOUT/VIN)
Power dissipation across the MOSFET in a synchronous solution is:
PFET = RON × I2OUT × (1 – VOUT/VIN)
However, there are opinions stating that nonsynchronous buck converters offer higher efficiency at lighter loads and high duty cycles, and it seems that there is not a single converter that can deliver optimal efficiency across light to heavy loads. Are power system designers once again stuck on the proverbial “horns of a dilemma?”
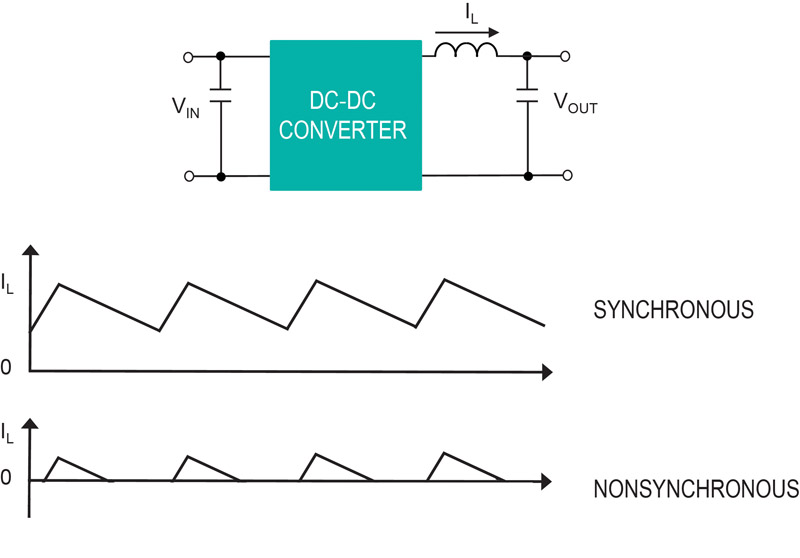
To answer that question, consider the main impetus for the high-efficiency performance of nonsynchronous converters at light loads. The inductor current flows in only one direction in nonsynchronous converters and never goes negative; the current flows in both directions in synchronous converters, and this is a disadvantage (see Figure 2).
Click image to enlarge
Figure 2. Current flows in synchronous converters vs. nonsynchronous converters.
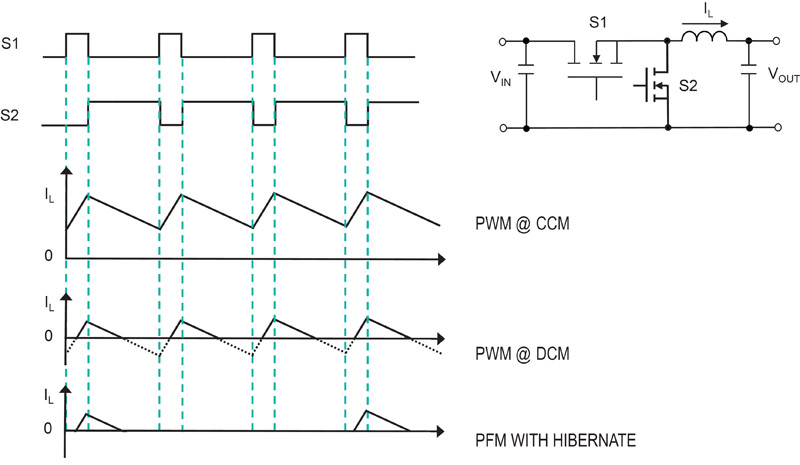
To overcome this dual-direction current flow in synchronous converters, different operating modes have been introduced to create “pseudo nonsynchronous” modes for light-load operation. Contemporary DC-DC converters support three modes (see Figure 3):
Click image to enlarge
Figure 3. Multimode operation in the Himalaya DC-DC buck converters from Maxim Integrated.
1. PWM @ CCM: pulse width modulation at continuous conduction mode. Here the converter operates as a constant frequency; IL is allowed to go negative. This mode allows the converter to respond quickly to any load change, even down to zero load, and still minimize the output voltage ripple. Nonetheless, PWM @CCM mode offers lower efficiency at light loads.
2. PWM @ DCM: pulse width modulation at discontinuous conduction mode. This approach also features constant frequency but improves efficiency at light loads by preventing IL from going negative. It is similar to the nonsynchronous solutions by disabling negative inductor current at light loads.
3. PFM with hibernate: pulse frequency modulation with hibernate mode. This approach improves efficiency by preventing IL from going negative and turning off both FETs to skip pulses at light loads. During the skipping period, the converter enters hibernation where it turns off unutilized internal circuitries to save quiescent current. This mode achieves the best possible efficiency, offers the highest light-load efficiency, and sacrifices only a slightly higher output voltage ripple.
All modes work the same way when the load current is moderate to full load. The difference comes when the load current reduces to less than half of the inductor current ripple value.
Is your system expected to be in standby (i.e., low-load operation) most of the time and is prolonged battery life critically important? Then choose PFM mode because it offers the highest light-load efficiency. There is, however, a caveat with PFM mode: check to ensure that the higher output ripple and slower transient response do not adversely affect system performance during standby.
Is light-load transient performance paramount in your application? Then PWM @ CCM is your best choice, since it gives the best transient response, even down to zero load.
The PWM @ DCM mode offers a reasonable trade-off between the other two modes.
Looking forward
Technology marches on. By replacing the external Schottky diode with an integrated efficient MOSFET along with the multimode operation, today’s synchronous solution provides superior efficiency in the most compact designs. It is time to embrace the new synchronous technology to boost the power performance of your next design. It is simpler, cooler and better.