Brushless motor control; design considerations
Figure 1
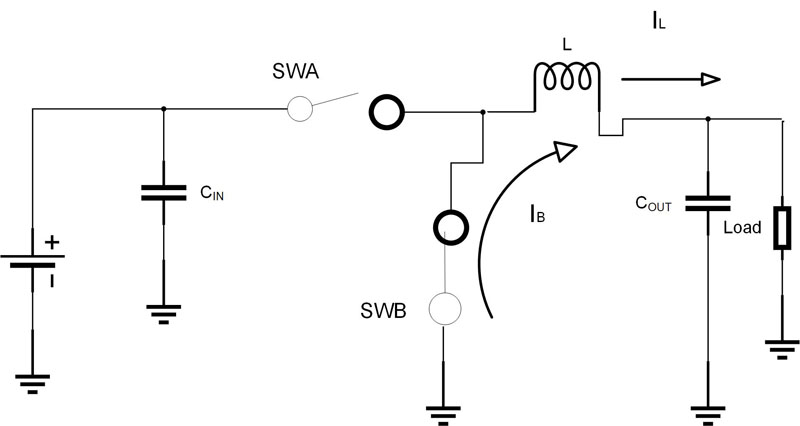
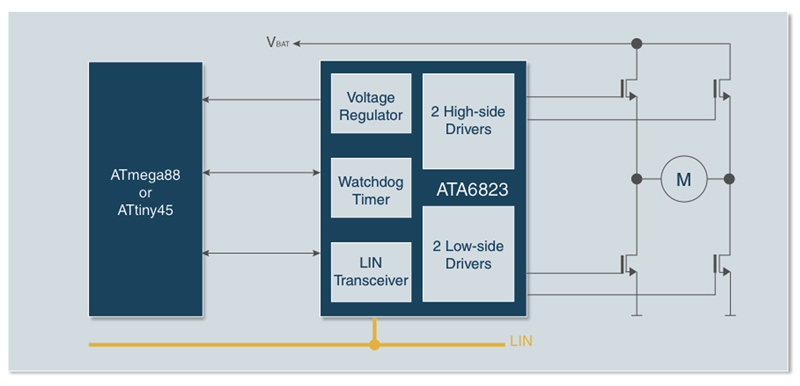
There are many applications today where the prevailing brushed DC motors continue to represent high demand on the power grid. In most cases, these durable motors, based on proven technology, meet customer application requirements and failure rates are low. But brushless DC (BLDC) motor applications are now emerging and their extended functionalities are becoming increasingly attractive. Regardless of whether DC-brush or brushless DC motors are used, the challenge in electronic motor control is to design for new functionality while maintaining reliability and high performance. Brushed DC Motors - Advantages and Disadvantages Brushed DC motors are a proven technology offering several advantages. In addition to low initial cost, brushed DC motors also stand out for their reliability, the high volume of production possible with this technology, and the ease with which motor speed can be controlled. The low initial cost involved is perhaps the most important benefit, being preferred for brushed motor control in price-sensitive applications. However, this technology has its drawbacks. One disadvantage is that carbon brush wear can reduce the motor's useful service life. Additionally, DC motor brush fire may cause EMI (Electro-Magnetic Interference). While the low effort and cost of electronic control with brushed DC motors is associated with the use of relays, a trend is underway to use transistors instead. Relay control is still the simplest method of controlling brushed DC motors, and arguably performs better for certain applications with unidirectional operation. So, while relays have sufficient reliability in most cases, particularly when motors are rarely switched on, transistors are increasingly preferred when the following variables are considered: mechanical stress and vibration; switching frequency; high coil current; speed control; size and space; and clicking noise. Brushed DC Motors - Predriver Control in an H-bridge Typically, half-bridge drivers are employed for brushed DC motor control. In reversed DC motor applications, for example, the DC motor is typically an H-bridge configuration with four power MOSFETs forming the bridge. Currently available H-bridge driver ICs are often simple �predrivers', which activate and deactivate the gates of discrete power MOSFETs. While Atmel takes a more integrated and complex approach, what is most important is to use the right combination of microcontroller and driver. For example, Atmel's ATA6836, which is a fully protected hex half-bridge driver, designed in the company's smart power SOI (Silicon-on-Insulator) technology, can be used by a microcontroller to control up to six different loads. Up to a current limit of about 650mA, the ATA6836 can be used to drive up to 5 DC motors directly in H-bridge configuration. An example circuit showing the case for DC motors with higher wattage (say 10W to 800W) is shown (Fig 1) with an integrated gate driver (the ATA6823), a microcontroller, and discrete N-channel power MOSFETs selected according to the DC motor's wattage.
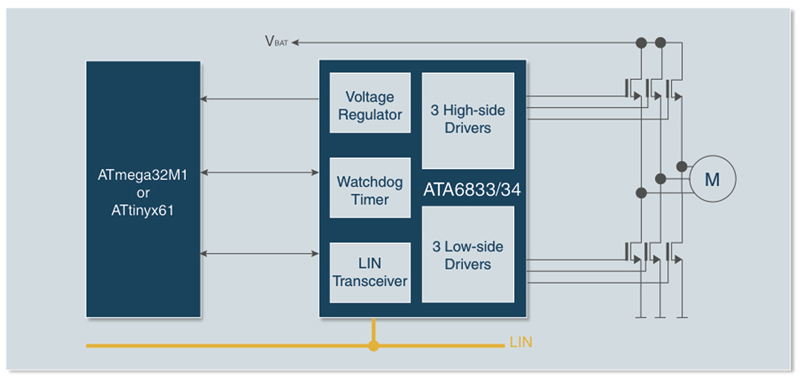
Brushed DC Motors - Further Design Considerations When designing brushed DC motor control systems, high-temperature is another consideration. However, the ATA6824, for example, has been specifically designed for the demands of engine compartment applications where electronic control units are specified for ambient temperatures of 150°C or higher. However, a system-basis predriver with an integrated 100mA 3.3/5V linear regulator will needs to be qualified for a junction temperature of up to 200°C. Protection is another important consideration. Discrete power MOSFETs, for example, need to be protected against overcurrent conditions. This is typically achieved by monitoring the drain-source voltage that is fed to a comparator integrated in the predriver. A high short-circuit current will flow if a high-side and a low-side power MOSFET are activated simultaneously within the same branch. System basis gate drivers should feature integrated protection to counter this event. In choosing a motor driver, designers also look for good speed and direction control. Characteristically, the architecture of system-basis chips involves the integration of all necessary peripheral functions into the driver IC. In this specific case, speed and direction control are made extremely easy. The microcontroller needs only two command lines to set the speed and direction of the DC motor: the direction pins (clockwise or counter-clockwise) and the PWM pin. The moment the PWM signal is low, the system basis predriver activates both high-side drivers so that the freewheeling current can flow without any additional microcontroller commands. Brushless DC Motors BLDC motors are now emerging in many applications, although they have been popular in disk drives and industrial applications for many years. According to the latest available market data, around 80% of DC motor applications are still equipped with brushed motors. However, brushless applications are growing at the fastest rate and are expected to take the lion's share of new motor control electronic design. The advantages of BLDC motors over brushed motors are reasonably obvious: improved speed vs. torque characteristics; high dynamic response; high efficiency; noiseless and interference-free operation; extended speed ranges; and long operational life. BLDC B6 Predrivers Currently applications mainly incorporate highly efficient three-phase brushless DC motors, which typically need a B6 bridge to control three �high-side' and three �low-side' power MOSFETs. As with the system-basis H-bridge predrivers, the ATA6833/34 high-temperature B6 bridge predrivers include all the elements needed to form a complete system. The system shown (Fig 2) comprises a pin-programmable linear voltage regulator (100mA, 3.3/5V); a LIN transceiver; and a window watchdog, in combination with six push-pull stages, required to control the six discrete N-channel power MOSFETs that operate three-phase brushless DC motors. Flexibility is a must concerning the control of the power MOSFETs in three-phase brushless DC motors. In a B6 predriver, because flexibility control is mandatory for different kinds of commutation, it does not make sense to use a two-pin motion control. Therefore, the MOSFETs should be controlled from the microcontroller separately via the high-side and low-side driver inputs of the ATA6833/34.
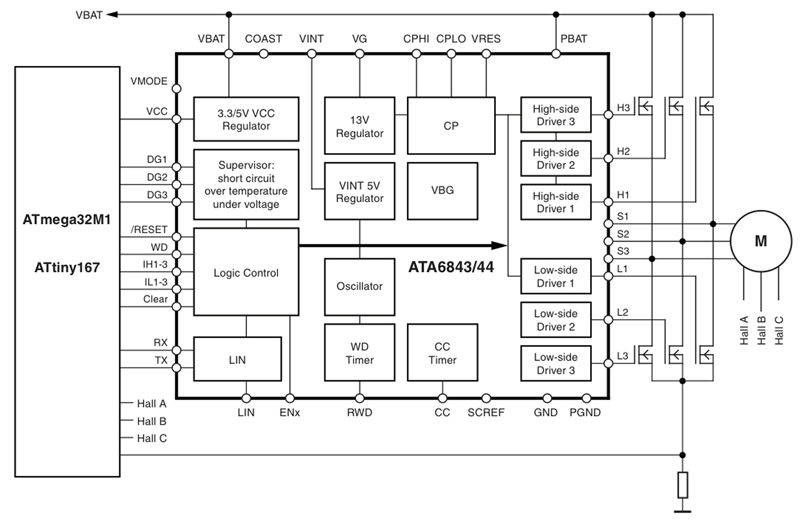
New Generation of BLDC Motor Predrivers To enable new BLDC motor applications that take advantage of extended functionalities, Atmel has developed a new generation of advanced system-basis B6 predrivers. They comprise six push-pull stages combined with a 100mA, 3.3/5V pin-programmable linear voltage regulator, a watchdog timer (with a time base independent of the microcontroller), and a LIN transceiver. Unlike the standard-temperature version Atmel ATA6843, the warning threshold of the ATA6844 is set to 150°C, and its excess temperature switch-off threshold is set to 200°C. This makes this IC able to cope with the demands of high temperature environments experienced in some manufacturing, heavy industrial or automotive environments. Functionalities of the next-generation ATA6843 and ATA6844 (Fig 3), include: • Expanded overvoltage detection threshold (up to 30V). This is an important feature for all applications requiring full functionality during jump-start conditions, such as fuel pumps. • Adjustable and very low short-circuit-detection threshold for increased compatibility with low-impedance power MOSFETs. The drain-source monitoring can be adjusted by feeding a voltage in the range of 0.5V to 3.3V to pin SCREF. An internal voltage divider sets the detection threshold to 2.5V if the pin is left open. • A digital input at pin COAST connected to the logic control. If this input is activated, all power MOSFETs are switched off, allowing the motor to coast. In some situations, the motor is asked to coast until it stops. Also, the coast function may be used in the case of overvoltage or to reduce speed before reversing the BLDC motor. Finally, the predrivers include 6-pin control providing freedom to control discrete power MOSFETs for sinusoidal commutation, and also allow simple and cost-effective MOSFET control via the microcontroller's three command lines. www.atmel.com