Synchronous High-Power Buck LED Controller Enables Efficient Automotive Exterior Lighting
Advanced Lighting Technologies Enhance Safety
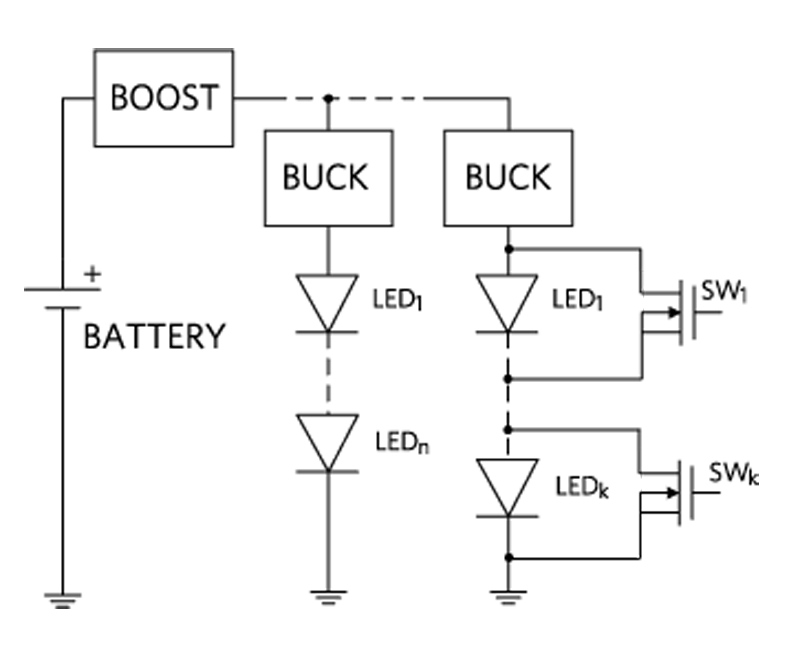
Figure 1. Advanced LED Lighting System
With their support for unique headlamp designs and their energy efficiency, high-power LEDs are becoming common components for automotive exterior lighting designs. Their brightness and precision control also have positive implications for safety. Taking a look at the electronics that support the LEDs, it’s clear that they must be fast, efficient, and accurate to control light intensity, direction, and focus. Ideal components must also be able to support a wide input voltage range and be able to operate outside of the car radio’s AM frequency band in order to avoid electromagnetic interference (EMI). For adaptive front-lighting systems, it’s also important for these components to support complex light patterns that are necessary in LED matrixes.
Let’s take a look at a typical LED power management solution and examine a novel buck controller IC that enables a fast, efficient, and accurate LED lighting solution.
Advantages of LEDs for Automotive Exterior Lighting
Compared to traditional lighting technologies, LEDs boast significant advantages. With the superior clarity of the white light in LED headlights, LEDs enhance driver reaction time. LEDs also play a role in improving visibility for drivers when in poor light conditions: the adaptive front-lighting systems (AFS) that are enabled by LED matrixes result in fast, complex light pattern changes. For example, during nighttime driving, AFS can automatically adjust the light pattern in response to the beams of an incoming car, so that the oncoming driver isn’t blinded by harsh lighting. Compared to incandescent lighting sources, the rise time of LED illumination is twice as fast, which means that LED-based brake lights illuminate quicker to warn drivers in advance. The other advantage of LEDs is that they consume less power than their incandescent counterparts—a positive from a fuel consumption perspective. It’s evident that LEDs inherently deliver clarity, speed, and efficiency. The electronic components that operate the LEDs—LED controllers—also play an integral role in both preserving and enhancing these qualities.
Powering the LEDs
From a single LED to LED strings and matrixes, this type of lighting has diverse configurations and can be used in a variety of automotive applications. For the best performance, high-brightness (HB) LEDs need constant current, which correlates with junction temperature and, as a result, color. That’s why HB LEDs must be driven with current, rather than voltage. The power source can be anything from a 12V car battery up to a 60V boost converter to accommodate a long string.
Dimming a Key Safety Feature
An important safety feature for LED headlights is dimming. When light dims from 100% down to 50%, the human eye can barely detect this. Only when dimming goes down to 1% or less does it become clearly detectable by the human eye. Given this, dimming is specified by a ratio of 1000:1 or higher. Since the human eye, under proper conditions, can sense a single photon, there’s practically no limit to this function.
Current must be kept constant to preserve color. As such, the best dimming strategy for LEDs is pulse-width modulation (PWM). With this strategy, light intensity is modulated by time-slicing the current instead of changing the amplitude. To prevent flickering in the LED, the PWM frequency must be kept above 200Hz.
With PWM dimming, the limit to the minimum LED ”on/off” time is the time it takes to ramp up/down the current in the switching regulator inductor. This could result in tens of microseconds of response time, which is too slow for LED headlight cluster applications that rely on fast, complex dimming patterns. In this case, dimming can only be performed by individually switching on/off each LED in a string using dedicated MOSFET switches (SW1-K in Figure 1). The current control loop will then need to be fast enough to recover quickly from the output voltage transient from the switching in and out of the diodes.
What Should the LED Controller Provide?
The most effective LED controller is one that supports a wide input voltage range and provides a fast-transient response. Reducing radio frequency interference and meeting EMI standards calls for ahigh, well-controlled switching frequency, outside the AM frequency band. In addition, high efficiency reduces heat generation, enhancing the reliability of the LED light system.
A Closer Look at the Headlight System
To manage the variabilities of the input voltage (dump or cold-crank) and the EMI emissions, sophisticated headlight systems typically use a boostconverter as a front-end that provides a well-regulated, sufficiently high output voltage (Figure 1). With a stable input supply in place, dedicated buck converters can deal with the complexities of controlling the lamp’s intensity and position. Each buck converter can then focus on controlling a single function, such as high beam, low beam, fog, daytime running lights (DRL), position, etc.
In the application highlighted in Figure 1, each buck converter’s main control loop sets the current in its LED string, with two secondary loops that implement the overvoltage and overcurrent protection.
Drawbacks of Typical High-Power Buck LED Driver Solution
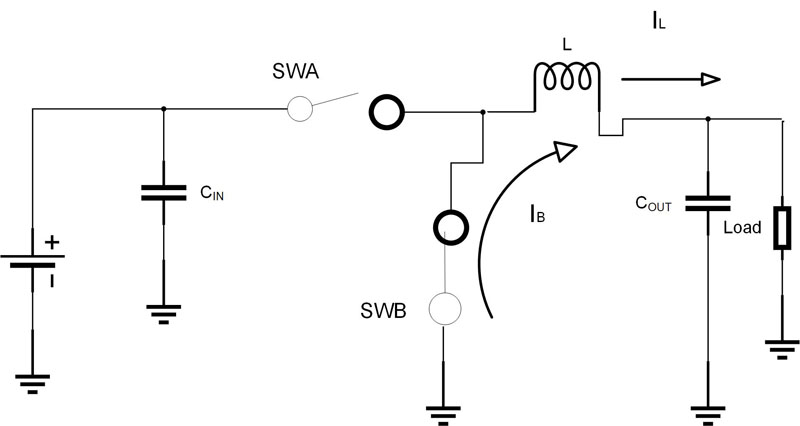
Figure 2 displays a typical buck LED driver solution. It uses a p-channel, high-side MOSFET, with relatively high RDSON versus an n-channel transistor, as well as a nonsynchronous architecture that utilizes the Schottky diode D for current recirculation. From an implementation standpoint, however, these characteristics are marks of inefficiency.

Click here to enlarge image
Figure 2. Typical Nonsynchronous Buck LED Driver
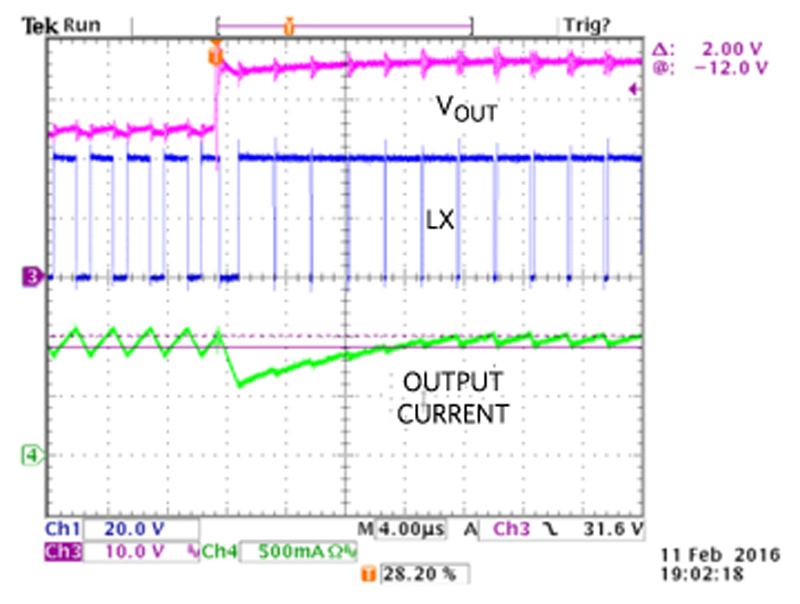
InFigure 3, we see that the transient response is another drawback of a typical LED driver solution. In the string of 12 LEDs in this test, the number of powered-up diodes has instantly grown from 8 to 12. The resulting output voltage step produces a current and voltage fluctuation that takes tens of microseconds to extinguish. A high-ratio PWM dimming circuit will sample this current for only a few initial microseconds, when the amplitude is dipping. This will yield incorrect dimming brightness and color.
Click here to enlarge image
Figure 3. Typical Transient Response with Hysteretic Buck
Why a Synchronous High-Power Buck LED Driver is a Better Choice
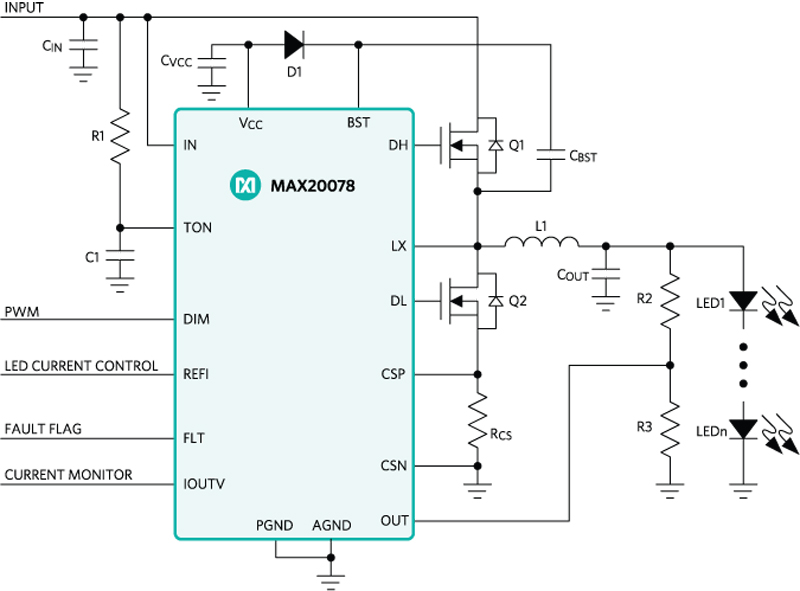
Based on the requirements we’ve already outlined, along with the need for high efficiency with synchronous rectification, an ideal solution is a synchronous high-power buck LED driver. A solution based on the MAX20078LED controller is shown in Figure 4.
Click image to enlarge
Figure 4. Synchronous High-Power Buck LED Driver
Using a proprietary average current-mode-control scheme, the MAX20078 LED controller regulates the inductor current while maintaining a nearly constant switching frequency. The controller, available in small package options, operates over a wide 4.5V to 65V input range at switching frequencies up to 1MHz and includes both analog and PWM dimming. It also provides a transient response that is virtually error-free compared to the example shown in Figure 3. The on-time of the MAX20078 can be programmed for switching frequencies ranging from 100kHz up to 1MHz. Its on-time varies in proportion to both input voltage and output voltage, which means that the switching frequency is virtually constant.
Summary
Powering complex LED lighting systems comes with some unique challenges. For optimal LED system performance, synchronous high-power buck LED controllers are a better choice than their non-synchronous counterparts. Accurate average current control, high-frequency operation outside the AM radio band, good transient response for high-ratio dimming accuracy, and high efficiency for minimum power consumption are among the capabilities that are needed to produce superior automotive exterior lighting.