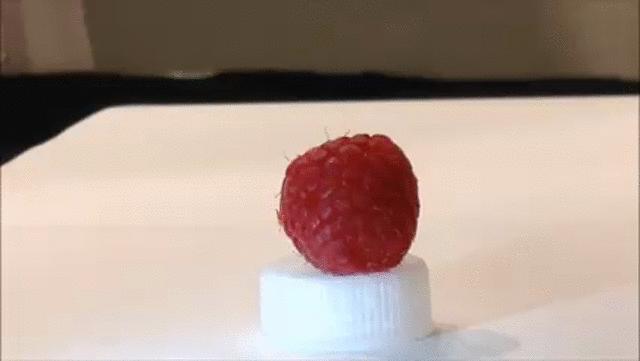
Stanford researchers developed the skin-like sensor on the fingertip of this robotic hand, and programmed it to touch the fruit without damage. One day they hope to create control systems to enable a robot to perceive the characteristics of objects and autonomously calculate how much force to apply.

Click image to enlarge
PSMA Energy Management Technical Committee Leadership Opportunity

Click on image to enlarge
CITE 2019 Press Conference